Робототехника: новое поколение подводных аппаратов

Концепция Mys Thyssenkrupp. Изображение из Thyssenkrupp.

поверхностный беспилотник uSEA в США. Изображения из США.
MUM (и дочери) изобретения: Морские нимфы и MUM вдохновляют новое поколение подводных систем и транспортных средств. Элейн Маслин смотрит.
Список претендентов на вход в подводный домен быстро растет. Концепции различаются: от подводных автономных материнских кораблей, способных нести множество полезных нагрузок на большие расстояния, до скоплений развернутых дна океанских узлов, которые могут найти путь к заранее запрограммированным местоположениям.
В энергетике: связан, как теперь называются кластер подводной долины в Осло и ежегодная конференция, некоторые из этих концепций были изложены, в том числе две норвежские технологические фирмы и немецкая Thyssenkrupp, фирма, которая в большей степени используется для разработки систем подводных лодок.
США представляет ULARS
Один из них, норвежский технологический запуск uSEA, предлагает гибридную систему для прерывания существующих подводных операций на пилотируемых судах с помощью комбинации подводных и надводных дронов.
uSEA была основана в 2017 году и с тех пор разрабатывает надводный беспилотник или беспилотный надводный корабль (USV) для поддержки подводных беспилотников (то есть автономных подводных аппаратов или AUV), так что пилотируемые суда больше не нужны и можно заряжать аккумуляторы. сделано в воде, избегая операций запуска и восстановления. Это отличает его от других концепций наземных беспилотных летательных аппаратов, которые, как правило, полагаются на полное восстановление AUV или автомобиля с дистанционным управлением (ROV) для подзарядки. Система uSEA называется uLARS (LARS означает систему запуска и восстановления) для подводных беспилотников, говорит генеральный директор uSEA Фелипе Лима, который служил в бразильском флоте до работы в Subsea 7, Aker Solutions и Xodus Group.
Это естественная прогрессия. Лима говорит, что современные AUV становятся все более и более способными и надежными. «Они занимают место, которое было задним двором ROV. Но у них есть ограничение; они полагаются на батареи, потому что они не соединены кабелями, как ROV, и им все еще нужен материнский корабль, например. обзорное судно, потому что их батареи разряжаются за 12-48 часов. С мобильной док-станцией для АНПА вы не зависите от док-станции на морском дне, и вам не нужно больше надводного судна ».
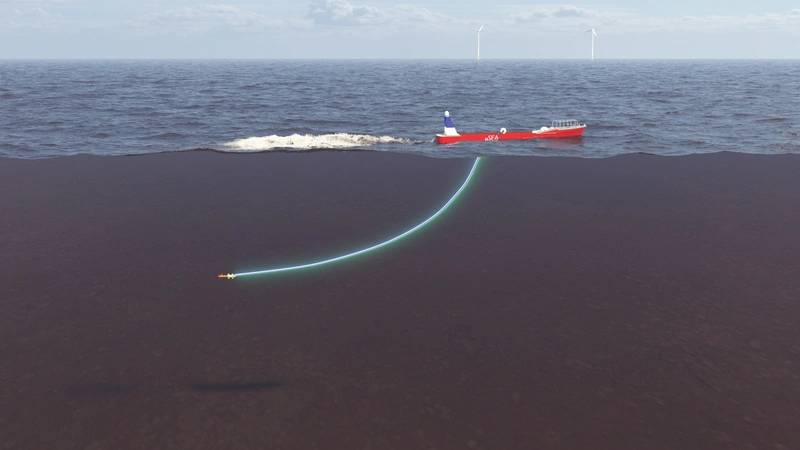 Интерфейс uLARS для подводной стыковки uSEA (Изображение: uSEA)
Интерфейс uLARS для подводной стыковки uSEA (Изображение: uSEA)
Система включает в себя погружную буксирную головку с индуктивным разъемом для зарядки и передачи данных, который немного напоминает дозаправку истребителей в воздухе. «Это означает, что воздействие волн минимально, потому что стыковка находится на контролируемой глубине», - говорит Лима, имеющая степень магистра подводного инжиниринга в Университете Абердина и степень магистра инноваций и предпринимательства в Университете Осло. Есть также система обработки на основе лунного пула для безопасного восстановления АНПА на палубе.
Система будет поддерживать подводную съемку на мелководье, а также в глубоких и сверхглубоких водах, работая с широким спектром полезных нагрузок, начиная от более традиционных типов, таких как гидролокаторы бокового обзора и многолучевые эхолоты, до более совершенных, таких как сонар с синтезированной апертурой.
ССЕА ищет партнеров для завершения квалификационной программы, которая ожидается к концу следующего года (2020 г.). После этого компания ориентируется на морские операции и ищет пилотные проекты для выполнения в 2021 году.
IDROP в океане
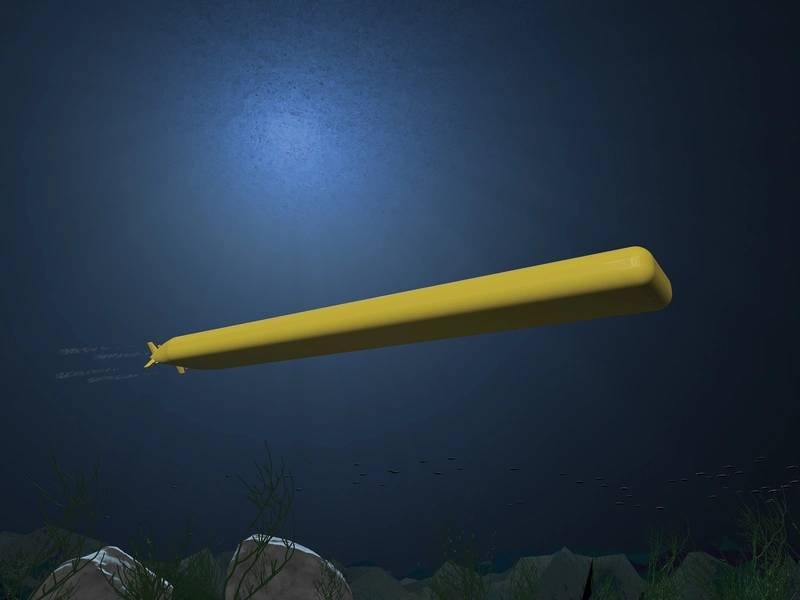
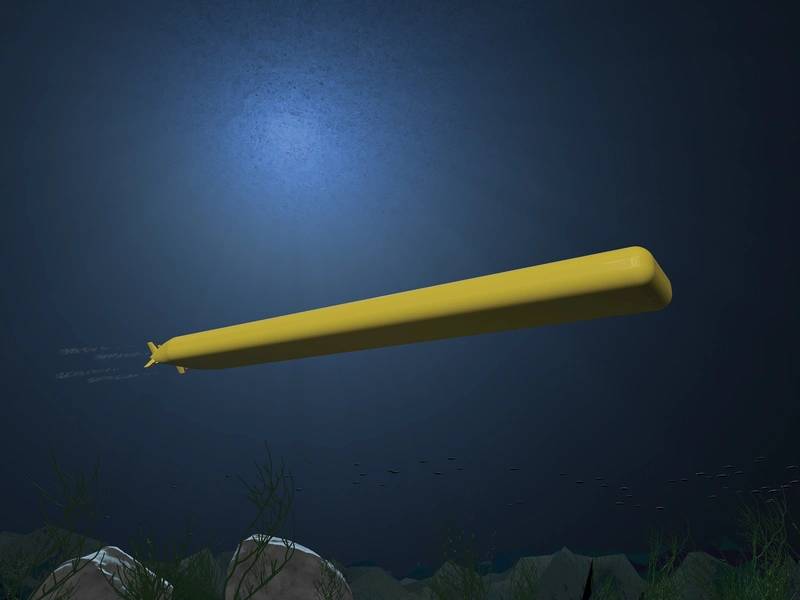
Другая норвежская технологическая фирма, iDROP, планирует разрушить рынок сейсмических технологий морского дна своими автономными узлами Oceanid. Система iDROP основана на отдельных цилиндрических сенсорных узлах (названных в честь греческих морских нимф), которые разворачиваются при падении, используя гравитацию и смещение балласта для движения и контроля положения, для приземления в определенных заранее запланированных местах на морском дне, где они приземляются на алюминиевые опоры выскочить, прежде чем они приземлились.
 Океанид iDROP. В греческой мифологии Океаниды - нимфы, которые были 3000 дочерьми Титанов Океана и Тетис. (Изображение: iDROP)
Океанид iDROP. В греческой мифологии Океаниды - нимфы, которые были 3000 дочерьми Титанов Океана и Тетис. (Изображение: iDROP)
Идея состоит в том, что они могут быть развернуты группами, образуя сетчатые структуры на морском дне для сейсмических исследований. Бортовые батареи приводят в действие контроль за спуском (используя только 5% батареи), сбор данных (в течение 180 дней) и запуск механизма, который выпускает 30-килограммовый балласт - сделанный из солевого раствора - позволяя единицам скользить обратно на поверхность, опять же, под контролем, поэтому они стремятся к ожидаемой цели. Затем их будет собирать наземная система с плавающим типом конвейерной ленты. «Существует множество технологий сбора сейсмических данных, которые в основном буксируются», - говорит Кирре Джём, основатель и генеральный директор iDrop, который ранее работал в Schlumberger и консультировал Эквинора и морского дна Geo Solutions. «Есть также узлы, которые размещены на морском дне с помощью ROV. Есть и другие, где вы сбрасываете их на борт с помощью бетонного балласта и некоторых альтернатив. Наша система устранит необходимость в крупных специализированных судах с тяжелой погрузочно-разгрузочной техникой и трудоемкими операциями ROV »
По его словам, группы Oceanids могут быть быстро развернуты, а степень детализации датчика (т. Е. Охват зоны и, следовательно, объем данных, которые необходимо извлечь) может быть увеличена, говорит он. Это благодаря возможности вертикального автономного бокового смещения 69 градусов, при котором каждый узел «опускается» в заданное положение. «Если вы хотите установить датчик на глубине воды 1200 м, вы можете добраться до 2 км от надводного судна и установить патч датчиков, а не линию», - говорит он.
Пакет из девяти узлов, каждый с полезной нагрузкой индуктивного модема, транспондера и сейсмического датчика, может быть развернут за 15 минут, что в 10 раз экономит время по сравнению с установленными методами, говорит Тьём. Цифровой близнец, основанный на расширенном моделировании и тестировании, будет использоваться для определения любого воздействия на окружающую среду, например. волны, ток, глубина и т. д., и, следовательно, позволяют контролировать спуск.
«Мы смотрим на революцию в способе установки дна океана на морском дне», - говорит Тьём. «Участники выполняют 40-170 раз в день и нуждаются в двух ROV, управляемых DP системах управления узлами, большом судне и специализированной команде. Чем глубже вы идете, тем медленнее, потому что им нужно больше тяги, чтобы вытянуть пуповину. Мы будем делать чуть меньше 1000 в день со стандартной морской командой ».
За кулисами в проект Oceanids была проделана большая работа, и только сейчас эта технология продвигается. Фактически проект начался в 2010 году, а прототип был построен в 2013/14 году. iDROP также построил систему восстановления и выполнил проверку на берегу для проверки системы восстановления. В этом году в Северном море запланировано второе пилотное испытание для получения трехмерных сейсмических данных в глубоководных районах. Девять транспортных средств были построены и должны были отправиться в море для испытаний в первом полугодии, а еще больше планируется построить в следующем году.
Мамино слово
Thyssenkrupp Marine Systems (MS), входящая в состав немецкого промышленного конгломерата, работает в масштабе, отличном от uSEA и uLARS. Фирма разрабатывает очень большой (до 50 м длиной) беспилотный подводный аппарат (UUV), называемый модифицируемым подводным кораблем (MUM), основанный на модульной конструкции, состоящей из базовых и миссионерских модулей.
За этим стоит мысль, что на сегодняшнем рынке подводных аппаратов для подводного плавания преобладают специализированные продукты, и ни один из них не может быть использован для множества задач. Итак, Thyssenkrupp приступил к разработке модульной системы, говорит Виллем Хендрик Венер, который руководит проектом в Thyssenkrupp MS.
 Концепция MUS компании Thyssenkrupp (Изображение: Thyssenkrupp)
Концепция MUS компании Thyssenkrupp (Изображение: Thyssenkrupp)
Базовыми модулями будут комплектация и системы дайвинга, батарея, силовая установка и водородный топливный элемент. Затем модули, ориентированные на выполнение миссии, могут варьироваться от развертывания океанического донного сейсмического узла (OBN) (> 1000 OBN) до систем бурения керна или от замены модуля подводного управления до размещения дистанционно управляемых транспортных средств, которые будут использовать большой UUV в качестве материнского корабля. Модульный комплект MUM будет состоять из модулей, которые имеют размер стандартных 20-футовых или 10-футовых контейнеров. Их можно комбинировать в соответствии со спецификациями миссии, в результате чего получаются совершенно разные транспортные средства: от 80 метрических тонн до более 300 метрических тонн или от 20 м в длину, 4 м в ширину и 3 м в высоту до примерно 50 м в длину, 7 м в ширину и 3 м. высокий, с энергопотреблением, зависящим от полезной нагрузки и скорости движения.
«У других подводных аппаратов есть модульные подходы, но в основном с точки зрения адаптации секции полезной нагрузки или увеличения выносливости за счет увеличения энергоемкости», - говорит Венер. «Хорошим примером является AUV SeaCat ATLAS, который может изменять свою полезную нагрузку, меняя головку транспортного средства, и может расширять диапазон, добавляя больше емкости аккумулятора».
Венер говорит, что автомобиль MUM сможет преодолевать сотни миль, в зависимости от конфигурации автомобиля, с его мощностью водородного топливного элемента 80-160 кВт и глубиной воды до тысяч метров. «Подводный диапазон масштабируемый и составляет около 100 морских миль; вполне достаточно для текущих случаев использования », - говорит он. «Наша система хранения газа для топливного элемента примерно в три раза превосходит батареи по энергии на единицу объема и даже больше по весу. Однако, если вы хотите преодолеть более 1000 морских миль, мы бы рекомендовали приповерхностный транзит с более традиционным, например, дизель-электрическим подходом. Концепция учитывает это ».
Водородные топливные элементы являются проверенной независимой от воздуха технологией для подводных лодок Thyssenkrupp; Компания имеет большой опыт работы с водородными топливными элементами на немецкой подводной лодке класса HDW 212A, а также на других подводных лодках. Батареи могут быть необходимы для пиковых нагрузок некоторых полезных нагрузок, но большинство современных конструкций автомобилей MUM имеют только резервные / аварийные батареи небольшого размера, говорит Тиссенгрупп. В настоящее время разрабатывается модуль для наземного или приповерхностного транзита, поскольку система топливных элементов имеет свои сильные стороны для выполнения подводных задач.
Для связи на большие расстояния в дальних полетах Thyssenkrupp MS стремится использовать самоходные модемы или автономные узлы связи с возможностью двунаправленной передачи данных для создания акустической связи на большие расстояния через цепочку этих узлов, а также локальная навигация или 3D-позиционирование через USBL модемы. Они разрабатываются EvoLogics в рамках подпроекта NaviMUM и будут развернуты из револьверного журнала на MUM.
EvoLogics называет концепцию самоорганизующейся мобильной подводной сетью, в которой узлы образуют ретрансляционные станции, а также обеспечивают позиционирование. Они автономно разветвляются в районе миссии, анализируют коммуникационную среду, затем удерживают позицию и соединяются, образуя гибкую подводную сеть. Некоторые из них будут иметь GNSS-приемник, чтобы получать периодические данные о реальном местоположении, говорит Венер.
«Очень большие транспортные средства, такие как MUM, в частности, нуждаются в мощных датчиках и алгоритмах для автономного обхода препятствий и перепланировки пути», - говорит Тиссенгрупп. «Саморегулирующиеся алгоритмы управления, отражающие большое разнообразие возможных конфигураций автомобиля, будут поддерживать концепцию автомобиля. В рамках проекта разрабатывается система мобильной связи и навигации с самоходными модемами LBL / USBL, которые могут устанавливать сеть и подключаться к транспортному средству MUM для транзита и зарядки ».
Thyssenkrupp MS создает небольшую версию MUM длиной 5 м, которая будет готова к испытаниям этим летом (2019 г.). Многие концепции, в частности, программное обеспечение автономии и мобильная связь, будут протестированы в этой системе. Основные технологии, такие как новый водородный топливный элемент, а также новая конструкция корпуса под давлением, также будут испытаны в реальном размере в этом году.
Реальное транспортное средство MUM должно быть построено на испытаниях с 2020 года, с испытаниями и испытаниями до 2023-24. Разработка поддерживается консультативной группой из нефтегазовой отрасли, включая оператора Equinor, сейсмическую компанию PGS и подводного подрядчика Boskalis.
В компании также работают ATLAS ELEKTRONIK, Берлинский технический университет и Ростокский университет, работающие над проектом, соответственно над системой управления и симуляцией системы.
Компания Lamprell заключила сделку с ONGC по проекту замены подводного трубопровода.

Автоматическая стыковка как технология, обеспечивающая оперативную автономность подводных систем.

Перспективное направление: синие лазеры для глубоководных исследований

Обеспечение энергией самых дальних уголков космоса: выбор литий-ионных батарей для экстремальных подводных аппаратов

Международная океанологическая конференция 2026 года уделяет новое внимание прибрежной зоне.

Растущие ожидания: подробный анализ подводных аппаратов.

Самое холодное место во Вселенной

Завершение строительства научно-исследовательского судна «Эндевор»: чествование достижений и воспоминаний, накопленных за долгую жизнь.

Наблюдение за неспокойной Землей в ожидании следующего «крупного события»

От испытаний до прокладки кабеля: комплект подводного аппарата SMD Quantum ROV для интеграции с системой Fleming Jenkins
")
Модернизация обнаружения неразорвавшихся боеприпасов: более интеллектуально, безопасно и на основе более качественных данных.

Новый год, новое оборудование: угрозы, модульность и гибкость — залог развития подводной обороны в 2026 году.
 ВМС США выполняет маневры в Атлантическом океане во время учений UNITAS 2025, 66-х по счету крупнейших в мире многонациональных морских учений. (Официальное фото ВМС США)")