Летающие новые маршруты Подводный

Изображения: Modus Seabed Intervention

Изображения: Modus Seabed Intervention

Изображения: Modus Seabed Intervention
Компания Modus Seabed Intervention Limited, расположенная на северо-востоке Англии, является относительно небольшим бизнесом, но ее цели амбициозны и целенаправленны. Элейн Маслин сообщает.
После четырех лет разработки гибридного AUV / ROV (HAUV) на основе модифицированной системы Saab Sabertooth AUV компания Modus Seabed Intervention приобрела вторую модель Sabertooth для глубоководных работ, которая будет выпущена этим летом.
Приобретение последнего Sabertooth с рейтингом 3000 м позволит компании продолжать развивать свой послужной список и предлагать автомобили с расширенными возможностями искусственного интеллекта и автономии.
Видение компании состоит в том, чтобы ее HAUVs работали на приусадебных участках на морских нефтегазовых и возобновляемых участках, включая ветряные электростанции, независимо от сервисных судов. Это может быть через наземную систему развертывания или через подводный гараж / док-станцию, в которую транспортное средство может «влетать» и выходить из нее. Находясь в док-станции, автомобиль может работать как AUV (без привязи), используя бортовые батареи, или, где требуется непосредственное управление, он может работать как ROV либо через оптоволоконную привязь (которая обеспечивает очень длительные экскурсии), или с помощью полной мощности и управления шлангокабелем.
Вместо развертывания на специальном вспомогательном судне док-станция предназначена для развертывания на морском дне от судового крана. Цель состоит в том, чтобы использовать судно, уже задействованное в определенном месте, такое как судно снабжения, DSV или оффшорное судно для обслуживания возобновляемых источников энергии. HAUV может затем проводить инспекцию и / или обследование независимо, в сочетании с основной деятельностью судна, снижая затраты. HAUV вернется в свой док по завершении рабочего объема и будет ждать восстановления в удобное время. «Например, если вы наняли судно для выполнения операции по снабжению платформы, вы можете снять HAUV на выходе и затем забрать его на обратном пути после того, как оно выполнит свою предопределенную задачу», - говорит Найджел Уорд, Modus ' коммерческий директор. Исходя из емкости аккумулятора текущего HAUV Modus, съемки, охватывающие около 60 км, могут проводиться на одной автономной зарядке, причем время съемки зависит от скорости и полезной нагрузки.
Фон Modus в подводных траншейных услугах. Когда компания собиралась инвестировать в новые технологии, она чувствовала, что рынок ROV был зрелым, если не насыщенным, поэтому Modus стремился диверсифицировать и приобрел AUV Remus с целью предоставления услуг по обследованию и инспекции с более низкой стоимостью от судов, которые уже были вне работы. Намерение состояло в том, чтобы отбросить суда назад и позволить Ремусу уйти и выполнить свою работу, в то время как судно продолжало выполнять свою основную задачу (вместо того, чтобы использовать ROV, связывая судно поддержки ROV) Преимущества были замечены как уменьшение человеческой ошибки облегчение оффшорных проектов, удержание квалифицированного персонала на суше, снижение затрат и повышение безопасности.
Ремус был не совсем подходящим средством для деятельности, в которой участвовал Модус. Он поставлялся с гидролокатором бокового обзора, но заказчикам требовалась батиметрия, и, как и во многих системах AUV, было сложно модернизировать автомобиль или заменить датчики для различных применений », - говорит Уорд. «В любом случае, существующие на рынке AUV на самом деле не настолько автономны, часто судну необходимо отслеживать транспортное средство во время действия, которое, на наш взгляд, побеждает объект автономной функции».
 Изображения: Modus Seabed Intervention
Изображения: Modus Seabed Intervention
Итак, Модус посмотрел на Саблезубую доску Saab Seaeye. «Это нечто среднее между ROV и AUV. Мы хотели преимущества обоих. Возможность быстро и легко смонтировать полезную нагрузку гибкого датчика опроса имеет решающее значение для удовлетворения требований заказчика. Мы можем нанять датчик, интегрировать его и все готово.
В настоящее время разрабатывается так много новых технологий съемки, поэтому мы хотели убедиться, что сможем использовать их, чтобы защитить автомобиль в будущем.
«Мы также хотели иметь возможность парить как ROV, иметь скорость AUV и иметь возможность выполнять действительно автономные операции, поэтому вам не нужно выделять судно для преследования HAUV с помощью ультракороткой базовой системы позиционирования. , Мы чувствовали, что Saab Sabertooth соответствует этому критерию.
«В своем базовом пакете автомобиль использует INS IXBlue Phins3 и рабочую лошадку RDI с возможностью сбора данных, навигации и обработки данных датчиков, управляемой QINsy, которая также принимает данные Novatel DGPS. Однако полезная нагрузка является гибкой, и она может также работать в массивах с длинными базовыми линиями (LBL) или с системой USBL, где это требуется, с Sonardyne AvTrak 6, обеспечивающей преобразователь, трансивер и телеметрическую связь в одном », - говорит Уорд.
В 2017 году компания провела демонстрации и испытания, и в 2018 году HAUV был готов к коммерческим операциям. В одном из пробных проектов в 2017 году HAUV был запущен с набережной у озера недалеко от предприятия Saab в Швеции для выполнения «косить». предварительно запрограммированная съемка в стиле «газон», собирающая данные MBES, SSS и SBP на маршруте длиной около 15 км, без помощи извне вспомогательного судна (только DGPS, INS и DVL). «Выйдя и повторив опрос, он увидел очень небольшой дрейф», - говорит Уорд. Транспортное средство также было успешно испытано несколько раз, автономно пристыковываясь к его подводному гаражу. В начале 2018 года эта функция получила дальнейшее развитие в рамках финансируемого Innovate UK проекта по проверке жителей ветропарка. Это испытание было проведено на объекте ORE Catapult в Блайте и включало в себя косвенное подключение питания и передачу данных с использованием индуктивного разъема Blue Logic.
На заключительном этапе этого финансируемого демонстрационного проекта, в конце этого года, в период между его коммерческими обязательствами, компания опробует гибридную концепцию AUV для резидентов на морской ветряной электростанции в Великобритании. HAUV и его док-станция будут отправлены на миссию, аналогичную демонстрации на объекте ORE в Блайте. В этом случае он не будет взаимодействовать с какой-либо инфраструктурой ветропарка. «Однако подключить док-станцию к ветровой электростанции, чтобы получить доступ к электроэнергии и коммуникациям, было бы относительно просто», - говорит Уорд, - «поскольку уже имеется доступная инфраструктура питания и данных, используемая для работы над турбинами, к которым мы можем подключиться».
 Изображения: Modus Seabed Intervention
Изображения: Modus Seabed Intervention
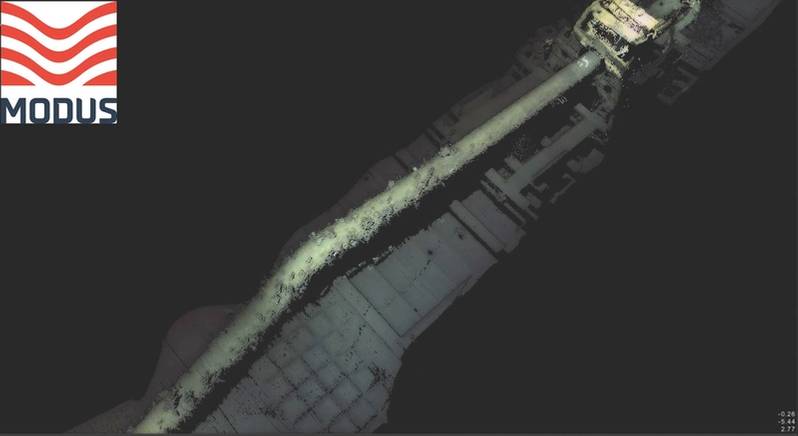
В прошлом году Modus развернул HAUV на шельфе северо-западной Австралии для проведения около 240 км обследования целостности трубопровода, получая потрясающие снимки, а также данные облаков точек, как по трубопроводу, так и по проходящим морским обитателям (см. Вставку с деталями зубов акулы, взятые в 2 узла) с использованием лазерного профилирования Cathx Scout и HD-изображений, распространяемых вместе с многолучевым эхолотом (MBES).
Время опроса составляло половину того, что потребовалось бы при использовании традиционного ROV для проведения опроса, и это могло бы быть быстрее », - говорит Уорд. «Такое обследование возможно без привязи, но в этом случае оно было проведено с привязкой, чтобы можно было собирать данные в режиме реального времени».
Для навигации автомобиль использовал USBL, помогающий следовать списку позиций маршрута из готовых карт трубопровода. Это может быть объединено с алгоритмом автономного отслеживания канала, который использует данные профиля канала, собранные для MBES, чтобы следовать маршруту канала. Это особенно полезно, если исходное положение не является точным, что может быть вызвано неточностью, вызванной допусками позиционирования. «Из-за этих систем AUV фактически может видеть конвейер, это означает, что помощь USBL не всегда требуется для проверки трубопровода, что позволяет выполнять автономные операции вдали от судов поддержки», - говорит Уорд. «Лазерная система CathX обеспечивает облако точек с очень высоким разрешением для трубопровода и прилегающего морского дна. Облака точек Laser и MBES были объединены в постобработке и использованы для оценки положения и возможных свободных мест. Очень высокое разрешение, полученное от лазерной системы, делает ее пригодной для прогиба катушек и других метрологических исследований на основе фотограмметрии ».
Поскольку транспортное средство устойчиво, тихо и может летать на постоянной высоте над трубопроводом, изображения и измерения, полученные из лазерных облаков точек, сшитых вместе с изображениями с камеры HD, очень точны и просты в обработке.
Один из рынков, на которые ориентируется Модус, - оффшорный ветер. Поля турбинных массивов часто находятся в зонах с сильным током, поэтому в 2017 году компания провела испытания своего HAUV на гидроэлектростанции в Швеции, где автомобиль, способный развивать скорость 4,5 т, продемонстрировал способность сохранять положение и успешно маневрировать при токе 3 кт. На морских ветровых установках часто используются служебные суда, идущие на работу, в полевых условиях для проведения работ по техническому обслуживанию. Это фактически гостиничные катера с большим избыточным временем. Мы разработали HAUV, чтобы иметь возможность развертывания и восстановления на этих судах, что в значительной степени заменяет необходимость мобилизации судна ROV для проведения инспекционных мероприятий. Это делает сервисное судно более ценным.
Для Модуса это не просто визуальный осмотр. Компания также проводила испытания системы FIG, разработанной Force Technology, которая может проводить бесконтактные исследования катодной защиты на 4 кГц, а также проводить исследование GVI.
«Saab разработала надежный подводный аппарат, и мы усовершенствовали его, чтобы он мог работать как ведущее в своем классе средство для обследования и инспекции», - говорит Уорд. «Мы сосредоточились на том, как датчики интегрированы, как они общаются друг с другом, программном обеспечении миссии, и теперь мы переходим к искусственному интеллекту и возможностям машинного обучения. Мы уже можем сказать «иди сюда, если ты видишь трубопровод, следуй по нему, или если ты видишь монополу, проводи проверку по ее окружности». Это все было продемонстрировано в испытаниях. Следующий набор автономных разработок будет очень увлекательным. В ближайшей перспективе мы хотим разработать трассу HAUV для автономной разведки и прокладки подземных кабелей. Различные технологии отслеживания труб в настоящее время проходят испытания. Ожидается, что это будет быстрое развитие, поскольку мы можем использовать алгоритмы, аналогичные тем, которые используются для отслеживания видимых конвейеров ».
Это было нелегкое путешествие, но Уорд видит, что некоторые видят потенциал. «Нет сомнений в том, что мы столкнулись с проблемами при выводе этой технологии на рынок», - говорит он. «Прежде всего, многие компании хотят выполнять операции так, как они всегда делают, например, некоторые операторы по-прежнему указывают камеры ROV и штанги для проверки трубопровода. Но те клиенты, которые приняли этот HAUV, которому требуется немного иной подход к решению проблемы GVI, получили выгоду от экономии затрат и улучшения качества данных.
«HAUV работает в коммерческом масштабе уже почти год, у него растущий послужной список, и мы очень рады дальнейшим оптимизациям и функциям, которые мы планируем ввести в эксплуатацию в ближайшие месяцы, в дополнение к приветствию нашего второго HAUV в парке через несколько месяцев. "
В районе штиля обнаружены подводные гидротермальные источники.
. Ученые обнаружили два новых гидротермальных поля в одном из наименее изученных районов Атлантического океана — Мегатрансформной зоне штиля и зоне разлома. Эта крупная, тектонически активная система пересекает Срединно-Атлантический хребет, образующий самую длинную горную цепь в мире. Такие гидротермальные поля редки из-за их гибридных «водопроводных» систем, характеризующихся типичными гидротермальными процессами.")
Преодоление барьеров в арктических исследованиях

Углублённый анализ: вызовы и тенденции в дноуглубительной отрасли.

Посадка семян вдохновения: восстановление зарослей морской травы

От неопределенности к преимуществам: WHOI запускает новые инициативы для партнеров по отрасли.
 развертывают системы наблюдения за океаном, используемые для сбора реальных данных об окружающей среде в целях принятия оперативных решений, моделирования и долгосрочного мониторинга океана. © WHOI")
Конструкция уплотнительных колец, часть 2: Радиальные уплотнения для внешнего давления
")
Масштабирование беспилотного флота: от отдельных судов до операций на системном уровне.

Исследовательская группа Института океанологии им. Шмидта обнаружила 31 новый вид.

Компания AUKUS займется разработкой подводных беспилотных аппаратов, поставки запланированы на 2027 год.

Компания Vard получила рекордный заказ на 800 миллионов долларов на научно-исследовательское судно для глубоководных исследований.
")
Компании Ørsted и PGE установили первые фундаменты на польской морской ветроэлектростанции Baltica 2.
-170484 "(Фото: Ван Оорд)")
MTR100: Анализ ведущих компаний в подводной сфере — прием заявок открыт.
