Современный дизайн UUV Propulsor


С точки зрения физики движения транспортного средства, беспилотный подводный аппарат (UUV) мало отличается от вашего личного лыжного катера или танкера. Он разделяет модель системы «Судно-Движитель-Двигатель», которая позволяет Движителю преобразовывать энергию Движения в тягу с целью перемещения Судна. Основные принципы равновесия тяги и движения являются общими для всех трех, как и перевод энергии вращения в осевую тягу центральным элементом системы - движителем.
Ограничения и цели дизайна не являются общими для разных типов транспортных средств, которые являются уникальными для миссии каждого транспортного средства. Например, лыжная лодка может нуждаться в большой тяге на скоростях буксировки и готова отказаться от потенциальной максимальной скорости, чтобы выполнить это требование миссии. Его передаточное число и характеристики гребного винта предназначены для этой цели. Для максимальной финансовой отдачи танкеру может понадобиться максимальная эффективность при «скорости бизнеса». Или он может дополнительно иметь ограничение на выбросы или сокращение расхода топлива, что требует компромисса в конструкции воздушного винта.
Подводные транспортные средства имеют свой собственный набор требований к конструкции движителей, связанных с их различными задачами, такими как срок службы батареи (или наибольшее расстояние, пройденное для бюджета батареи), максимальный диаметр корпуса, минимальная рабочая скорость, рассмотрение кожухов или сопел для гидродинамической эффективности или безопасности от контакт пропеллера или снижение шума для обеспечения тихой работы при сборе данных. Это настройка для нашей работы по разработке UUV-движителей в HydroComp, и она начинается с собеседования с клиентом, чтобы собрать действительно важную информацию для успешного проекта. Модель Vessel-Propulsor-Drive является хорошей основой для таких дискуссий.
судно
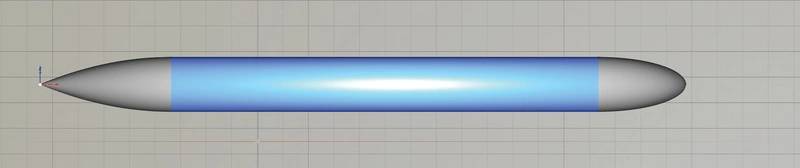
Типичный UUV - это форма корпуса тела вращения (также называемая осесимметричной формой), которая имеет нос, тело и хвост. Ради максимального внутреннего объема оборудования у некоторых автомобилей очень короткий нос и хвост. Как и следовало ожидать, существует определенный штраф за лобовое сопротивление для затупленного носа и штраф за движение для потока в пропульсоре, который не осевой, а вдоль крутого склона. Часть нашей работы заключается в том, чтобы сбалансировать другую часть сопротивления - создание волны или сопротивление давлению и сопротивление трения или вязкость - чтобы получить наименьший результат сопротивления объему. На самом деле, это не совсем так. Мы действительно хотим получить наименьшую мощность в объеме, и геометрия хвоста будет сильно влиять на способность движителя развивать полезную осевую тягу из энергии вращения.
Поэтому многие проекты по разработке движителей начинаются с прогнозирования коэффициентов сопротивления транспортного средства и тяги корпуса (дробная доля следа и выведение тяги) с использованием программного обеспечения NavCad® для моделирования гидродинамических и двигательных установок. Специальный модуль погружного транспортного средства обеспечивает надежные возможности прогнозирования для торпедоподобных форм корпусов UUV.
 Изображение: Hydrocomp Drive
Изображение: Hydrocomp Drive
На другой стороне пропульсора расположен привод, который обычно представляет собой электродвигатель. Электродвигатели различаются по электрическим характеристикам, но критическими данными для конструкции движителя являются его механическая кривая выходная мощность-частота вращения на валу. Разумеется, входная электрическая мощность «выше по потоку» важна и обеспечивает эксплуатационные ограничения. Мы характеризуем входную электрическую мощность с помощью кривой КПД двигателя, которая помогает ответить на вопрос: каков наш оптимальный целевой диапазон оборотов в минуту, если наибольший срок службы батареи является самым высоким приоритетом? С другой стороны, это кривая мощность-частота вращения вала, которая говорит нам об / мин для максимально возможной мощности вала и, соответственно, оборотов в минуту для максимальной потенциальной тяги движителя и скорости транспортного средства.
Как видно из типичных кривых зависимости мощности двигателя и электрической эффективности от числа оборотов в минуту, самая высокая потенциальная мощность редко (если вообще когда-либо) возникает при самой высокой электрической входной эффективности. Таким образом, нам часто приходится определять точку проектирования оборотов как компромисс, который не дает ни более высокую выходную мощность, ни лучшую электрическую эффективность.
Также имеет значение для любого обсуждения UUV с приводом от двигателя то, что обороты вала почти всегда существенно слишком высоки для оптимальной работы движителя. Нередко можно увидеть какую-то форму привода для достижения наилучших характеристик движителя или признать, что движитель может работать с посредственной эффективностью.
движителя
Вы заметите использование термина «пропульсор», а не «пропеллер». Это подтверждает концепцию, согласно которой форсунка и пропеллер (как это встречается в большинстве UUV и часто называют «подруливающим устройством» транспортного средства) - это интерактивная единица, Propulsor. Конструкция пропульсора - это комбинация поиска лучшего пропеллера и сопла (также называемого воздуховодом или кожухом) при отслеживании их взаимодействия. Другими словами, вы должны использовать инструменты проектирования, которые включают это взаимодействие, такие как NavCad для моделирования системы или PropElements® для проектирования компонентов пропеллер-насадка.
Во всех проектах по разработке пропульсоров UUV одной универсальной целью является разработка геометрии, которая генерирует самое высокое отношение тяги к мощности (его эффективность), которого мы достигаем, используя устоявшиеся практики. Как правило, влияние внешних конструктивных факторов может сделать успешную разработку пропульсоров UUV такой сложной. Например, RPM может быть слишком высоким (как отмечено выше). Геометрические ограничения могут ограничивать максимальный диаметр (чтобы он оставался в пределах диаметра кузова) или влиять на конструкцию, чтобы учитывать наклон хвоста транспортного средства.
Важно уделить минутку и упомянуть последствия производства пропульсоров UUV. В прессе ведутся серьезные дискуссии о аддитивном производстве (AM) для винтов. Хотя это может быть привлекательным с финансовой точки зрения и с точки зрения доставляемости, мы должны позаботиться о том, чтобы производительность не была скомпрометирована неправильной текстурой поверхности (которая может оказать огромное влияние на движитель небольшого размера, обнаруживаемый на большинстве UUV), сбоями на усталостную прочность или гидроупругий изгиб в лезвии. HydroComp разработал успешную практику использования AM для малых движителей посредством различных собственных исследовательских проектов.
Помимо этих практических соображений дизайна, один из самых интересных современных дизайнерских решений движет тему излучаемого шума. В рамках более широкой инициативы в области устойчивого развития HydroComp приобрела опыт в прогнозировании и смягчении гидроакустики пропульсора (термин, который отражает шум и вибрацию). Эти знания также предоставляются другим военно-морским архитекторам и инженерам по мере разработки новых гидроакустических функций для наших инструментов. Чувствительность проекта к шуму теперь всегда является частью обсуждения с нашими клиентами по разработке UUV-движителей.
Все гидроакустическое возбуждение происходит от колебаний массы (периодическое движение массы жидкости). Гидроакустика, приводимая в действие движителем, обычно вызывается изменениями в зонах низкого давления гребного винта, когда он вращается в «затененных» областях, например, за стойкой или контрольным плавником. Частично колебание происходит просто из-за изменения направления потока вокруг лопасти, вызванного изменяющимся притоком, но более существенно из-за быстрого расширения и разрушения кавитации на лопасти. Каждый из них оценивается как часть нашей конструкции пропульсора с уменьшением по мере необходимости изменений в контуре лезвия и его распределении шага развала.
Чрезмерное гидроакустическое возбуждение - и передача - могут также помочь с творческим дизайном сопла. Используя наш опыт в моделировании производительности форсунки, мы можем рассмотреть вопрос о том, может ли конкретная шумопоглощающая геометрия форсунки обеспечить необходимое подавление, а также любую потерю эффективности движителя.
Таким образом, несмотря на то, что UUV пропульсор имеет свою уникальную задачу, он все еще является лишь компонентом в рамках более крупной системной проблемы. Он может предложить удовлетворительную инженерную задачу, которая может быть успешно решена с небольшим вниманием, надлежащими инструментами и практическим опытом.
Об авторе
 Дональд Макферсон, автор.
Дональд Макферсон, автор.
Дональд Макферсон, ведущий специалист по моделированию двигательной установки, является техническим директором HydroComp, где он контролирует все разработки программного обеспечения и инженерные услуги. Выпускник Института Уэбба, он является членом SNAME и членом его группы по гидродинамике.
В районе штиля обнаружены подводные гидротермальные источники.
. Ученые обнаружили два новых гидротермальных поля в одном из наименее изученных районов Атлантического океана — Мегатрансформной зоне штиля и зоне разлома. Эта крупная, тектонически активная система пересекает Срединно-Атлантический хребет, образующий самую длинную горную цепь в мире. Такие гидротермальные поля редки из-за их гибридных «водопроводных» систем, характеризующихся типичными гидротермальными процессами.")
Преодоление барьеров в арктических исследованиях

Углублённый анализ: вызовы и тенденции в дноуглубительной отрасли.

Посадка семян вдохновения: восстановление зарослей морской травы

От неопределенности к преимуществам: WHOI запускает новые инициативы для партнеров по отрасли.
 развертывают системы наблюдения за океаном, используемые для сбора реальных данных об окружающей среде в целях принятия оперативных решений, моделирования и долгосрочного мониторинга океана. © WHOI")
Конструкция уплотнительных колец, часть 2: Радиальные уплотнения для внешнего давления
")
Масштабирование беспилотного флота: от отдельных судов до операций на системном уровне.

Исследовательская группа Института океанологии им. Шмидта обнаружила 31 новый вид.

Компания AUKUS займется разработкой подводных беспилотных аппаратов, поставки запланированы на 2027 год.

Компания Vard получила рекордный заказ на 800 миллионов долларов на научно-исследовательское судно для глубоководных исследований.
")
Компании Ørsted и PGE установили первые фундаменты на польской морской ветроэлектростанции Baltica 2.
-170484 "(Фото: Ван Оорд)")
MTR100: Анализ ведущих компаний в подводной сфере — прием заявок открыт.
