Выбор электродвигателя для подводных аппаратов: соображения эффективности при частичной нагрузке
Легко понять, почему синхронные двигатели с постоянными магнитами (PMSM) популярны для использования в подводных аппаратах (UV). Они компактны и эффективны с высокой удельной мощностью. Что еще более важно, возможно, они обеспечивают эффективную работу в широком диапазоне оборотов, что выгодно для транспортных средств с различными условиями эксплуатации. Тем не менее, мы обнаруживаем, что разработчики продуктов для автомобилей часто не уверены в «эффективности» двигателя. Эта статья предлагает несколько комментариев с точки зрения конструктора винтов, разрабатывающего компоненты, которые создают нагрузку на двигатель УФ.
Сначала мы должны начать с описания «системы», которая состоит из транспортного средства (устанавливающего требования к тяге), движителя (обычно открытый или обтекаемый гребной винт, который создает необходимую тягу) и привода (это первичный двигатель). чья единственная работа — раскручивать Propulsor на необходимых оборотах). Если мы обернем систему в концептуальную единицу, преимуществом системы будет скорость транспортного средства (или тяга, в случае применения тягача), а стоимость системы — «расход топлива». Для систем, приводимых в действие двигателями внутреннего сгорания, стоимость представляет собой потребление мазута, скажем, в единицах литров в час. Производители двигателей обычно предоставляют достаточно информации о расходе топлива в диапазоне оборотов двигателя и мощности, чтобы мы могли надежно прогнозировать расход топлива для любого применения. График этого распределения часто называют «топливной картой», но позвольте мне представить его как «карту эффективности» энергии на выходе.
К сожалению, при использовании приводов PMSM мы имеем совершенно иное обстоятельство. Путаница может возникнуть из-за того, что генерируемая мощность двигателя и топливо, используемое двигателем, имеют общий термин «мощность». и ток, подаваемый контроллером). Соотношение этих двух величин является «эффективностью двигателя». Знание правильного КПД двигателя при всех оборотах и нагрузках имеет решающее значение для успешного проектирования и анализа системы. В то время как большинство тестов разработчиков регистрируют электрическую мощность, нам необходимо знать мощность на валу для понимания общей производительности системы.
Хотя опубликованная производителем кривая двигателя указывает предел крутящего момента (и, следовательно, мощности) во всем диапазоне оборотов, они часто указывают только механическое-электрическое КПД в одной расчетной точке или при предельном крутящем моменте. В отличие от того, что доступно от поставщиков двигателей, у нас редко есть полная «карта эффективности» механической и электрической мощности в полезном диапазоне как оборотов, так и мощности на валу для СДПМ. Чтобы получить эти данные, некоторые из наших клиентов тестируют свои двигатели на небольших динамометрах для создания карты эффективности. Однако это может быть дорогостоящим и трудоемким занятием, а также потенциально напрасным занятием на ранней стадии проектирования, когда возникает вопрос, будет ли вообще выбран двигатель.
Каковы источники потери эффективности для PMSM? Объяснение представляет собой сложное сочетание таких терминов, как сопротивление обмотки, механическое трение и даже эффекты магнитного потока. Итак, давайте немного упростим это, добавив некоторые обобщения, используя общие термины: мощность на валу механической нагрузки (PS), эффективность (EFF), число оборотов в минуту и потери мощности (LOSS).
• КПД двигателя определяется как EFF = PS / (PS+ПОТЕРИ).
• Для упрощения можно сказать, что потери бывают двух типов: зависящие от мощности нагрузки или зависящие от оборотов.
• Потери (не КПД, а потери) имеют тенденцию быть пропорциональными а) числу оборотов в минуту и б) квадрату мощности.
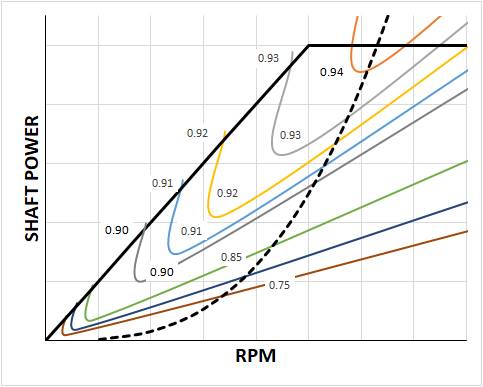
Типовая репрезентативная карта эффективности показана на графиках ниже для СДПМ с «постоянным крутящим моментом и постоянной мощностью». Наша практика заключается в том, чтобы всегда преобразовывать график, основанный на крутящем моменте, в график, основанный на мощности, поскольку мы считаем, что мощность — лучший способ сообщить о производстве и передаче энергии для транспортных средств и движителей. Сплошная черная линия представляет собой предельную кривую двигателя, пунктирная линия представляет собой общую кривую потребности движителя, а цветные линии представляют собой образцы карты эффективности.
Из этого графика видно, как работа при частичной нагрузке влияет на КПД двигателя. Существует широкий диапазон оборотов, который поддерживает высокую эффективность, так как почти половина верхнего диапазона оборотов находится в пределах пары процентов от максимальной эффективности двигателя, пока двигатель вырабатывает 80% или около того своей номинальной мощности. Что касается эксплуатации автомобиля, то на максимальной скорости КПД максимален и составляет 95%. При скорости 75 % потребляемая мощность составляет 40–45 %, а эффективность падает до 85–90 %. При скорости 50 % требуется небольшая мощность, а КПД двигателя может упасть до менее 75 %.
(Помните, что это общие цифры, используемые здесь для представления концепции. Фактическая эффективность будет варьироваться от модели к модели.)
Итак, позвольте мне оставить вас с несколькими основными наблюдениями:
• Максимальный потенциальный КПД СДПМ зависит от размера двигателя – двигатели большей мощности предлагают более высокий КПД. Например, PMSM мощностью 20 кВт может иметь максимальный КПД двигателя, превышающий 95% при полной нагрузке, тогда как двигатель мощностью менее 1 кВт обычно достигает только 90%.
• Как отмечалось выше, несмотря на то, что эффективность зависит от числа оборотов в минуту, должен быть достаточно широкий диапазон оборотов, обеспечивающий высокую эффективность для большинства приложений, требующих полной или почти полной нагрузки.
• Частичная нагрузка по мощности является серьезной проблемой для большинства применений, так как работа двигателя на малой мощности может привести к значительному падению эффективности двигателя. Например, КПД двигателя может упасть до менее чем 70% при дробной мощности на валу.
Электродвигатели, особенно СДПМ, являются важным направлением нашей работы по разработке NavCad в 2020 году. Мы работаем над упрощением определения этих приводов в NavCad, используя электрическую мощность в качестве «топлива» и общие формы кривой двигателя (такие как «постоянно- крутящий момент, постоянная мощность») для раннего проектирования. И, конечно же, мы углубимся в модель прогнозирования для нестандартных карт эффективности частичной нагрузки!
Прочтите эту историю в выпуске журнала Marine Technology Reporter за март 2020 г.: https://magazines.marinelink.com/nwm/MarineTechnology/202003/#page/20
Глубоководные районы Аргентины оказались более биоразнообразными, чем предполагали ученые.
-Южной-167708 "Научно-исследовательское судно Falkor (также) с дистанционно управляемым подводным аппаратом SuBastian развернуто в Южной Атлантике во время экспедиции. © Миша Вальехо Прут / Океанологический институт Шмидта")
Компания Fincantieri спустила на воду гидроокеанографическое судно ВМС Италии.
-167451 "(Фото: Fincantieri)")
Новое исследование показывает, как гренландские водоросли накапливают углерод в глубинах океана.

Глубоководные аппараты помогают ученым разгадать тайну темного кислорода.

Компания SUBCO объявляет о подключении APX East Australia к US Express Hypercable.

Компания AeroVironment запустила специализированный подводный аппарат Wraith.

Французская гидрографическая и океанографическая служба заказала новый морской беспилотник.

Компания Subco объявляет о достижении важных этапов в реализации проекта SMAP и расширении мощностей по всей Австралии.

План строительства ледокола в США продвигается с невероятной скоростью.

Исследование зафиксировало перенос микропластика зоопланктоном в глубины моря.
![Микропластиковые шарики, обнаруженные в центральной трубке копепода [его кишечном тракте], как показано здесь, флуоресцентно меченые шарики помогают визуализировать и идентифицировать его. © PML](http://images.marinetechnologynews.com/images/maritime/w400h400/Микропластиковые-шарики-обнаруженные-центральной-166795 "Микропластиковые шарики, обнаруженные в центральной трубке копепода [его кишечном тракте], как показано здесь, флуоресцентно меченые шарики помогают визуализировать и идентифицировать его. © PML")
Япония проводит испытания по глубоководной добыче редкоземельного ила на морском дне.

Океанографический институт Шмидта совершенствует картографические возможности научно-исследовательского судна «Фалкор».
-при-166549 "Научно-исследовательское судно «Фалкор» (также) после реконструкции носовой части, которая значительно повышает точность и надежность гидроакустических систем судна при получении высококачественных картографических данных даже в сложных погодных условиях. Фото: Миша Вальехо Прут/Институт океанографии Шмидта.")